

Um Abläufe effizienter zu gestalten und die Flexibilität zu erhöhen, übernehmen AGVs und AMRs zunehmend Transportaufgaben in der Produktion, Logistik und im Dienstleistungssektor. Zur Erfüllung der Anforderungen hinsichtlich kurzer Durchlaufzeiten, hoher Flexibilität und geringer Lagerbestände sind intelligente Gesamtlösungen gefragt, in denen Sicherheitskonzepte einen integralen Bestandteil bilden.
Bei Automated Guided Vehicles (AGV) – auch fahrerlose Transportsysteme (FTS) genannt – handelt es sich um innerbetriebliche flurgebundene Fördersysteme mit automatisch gesteuerten Fahrzeugen, deren primäre Aufgabe der Materialtransport ist. Die AGVs lassen sich auf verschiedene Arten betreiben, zum Beispiel auf Schienen, Rädern oder einem magnetischen Leitsystem. Die Fahrzeuge sind mit Sensoren und Kameras ausgestattet, damit sie ihre Umgebung erkennen und Hindernissen ausweichen. Ihre Steuerung erfolgt über eine zentrale Software, die den Transportauftrag an das AGV sendet und die Beförderung überwacht. Automated Guided Vehicles, die innerhalb und außerhalb von Gebäuden eingesetzt werden, bestehen im Wesentlichen aus einem oder mehreren Fahrzeugen, einer Leitsteuerung, Einrichtungen zur Standortbestimmung, Lageerfassung und Datenübertragung sowie der Infrastruktur und peripheren Einrichtungen.
Sicherheitsrelevante Steuerungsteile bis PL d gemäß EN ISO 13849-1
Zur Erledigung seiner Aufgaben benötigt ein AGV eine fest definierte Route. Hindernisse werden durch die Sensorik erkannt, ihnen aber nicht ausgewichen. Im Gegensatz dazu sind Autonomous Mobile Robots (AMR) in der Lage, durch die Unterstützung von KI-Methoden (Künstliche Intelligenz) situative Entscheidungen zu treffen. Aufgrund der zuvor erlernten KI und geeigneter Sensorik, die ihre Umgebung aufnimmt, sowie durch die Übermittlung von Rohdaten, können AMR navigieren und das Hindernis somit umfahren.
Die sicherheitstechnischen Anforderungen zur Absicherung von AGVs lassen sich aus der C-Norm EN ISO 3691-4 ableiten, die in der Ausgabe aus dem Jahr 2023 aktualisiert wurde. Lidar-Systeme (Light imaging, detection and ranging) zur Personenerkennung – beispielsweise Laserscanner – müssen so ausgelegt sein, dass sie das Fahrzeug anhalten, bevor es zum Kontakt zwischen den festen Teilen des Flurförderzeugs oder der Last und einer stehenden Person kommt. Zu diesem Zweck ist die gesamte Breite des AGV samt seiner Ladung zu berücksichtigen. Gemäß EN ISO 3691-4 müssen sicherheitsrelevante Steuerungsteile – wie Personenerkennungssysteme – bis zu Performance Level d nach der Norm EN ISO 13849-1 konzipiert sein.
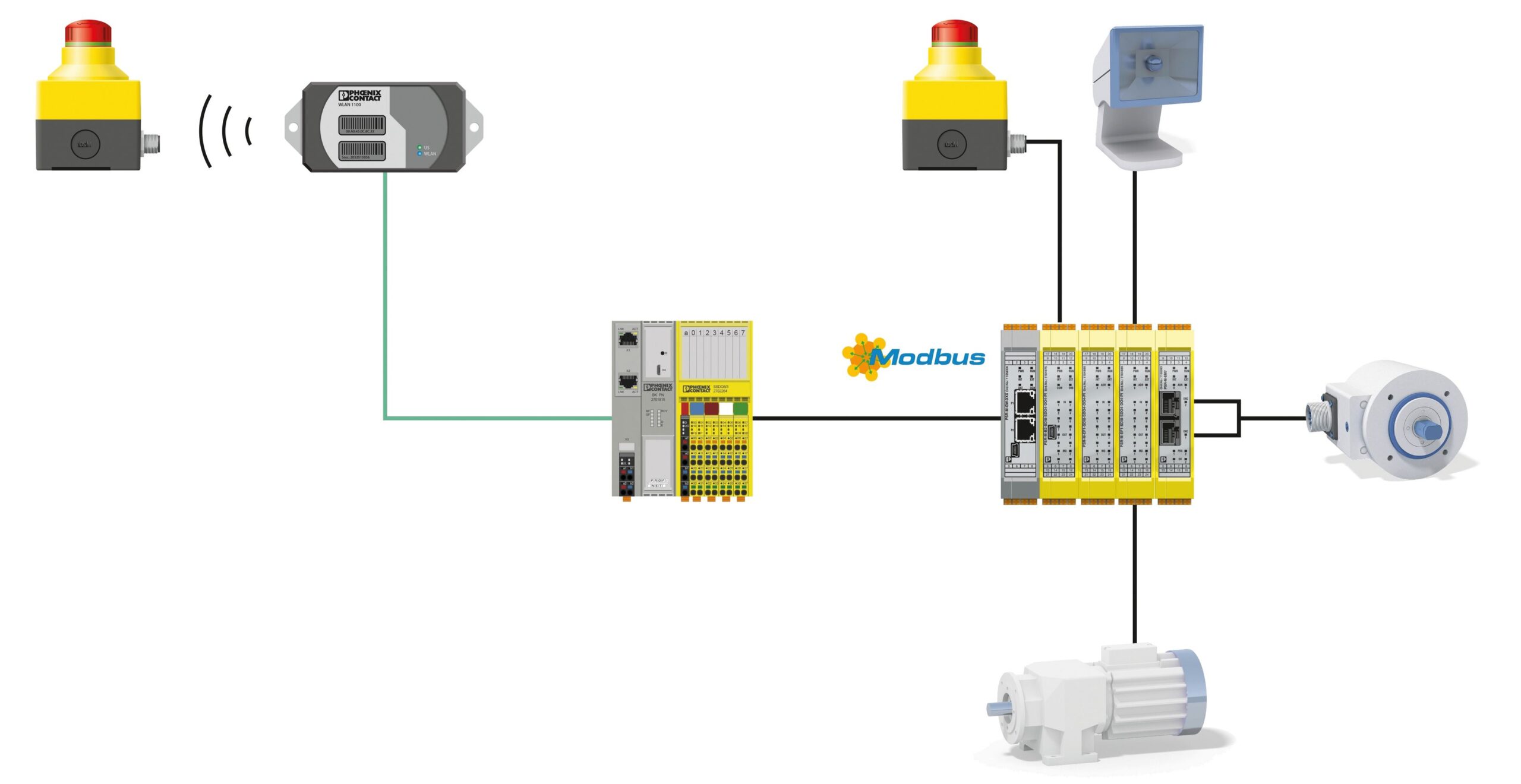
Sicherheitskonzept des lokalen AGV
Unterschiedliche Möglichkeiten der sicherheitsgerichteten Kommunikation
Die Schutzfeldgröße des Scanners ist in Abhängigkeit von der tatsächlichen Geschwindigkeit des Flurförderzeugs zu steuern, wobei gilt: Je schneller das AGV fährt, desto größer bemisst sich der Anhalteweg und folglich auch die Schutzfeldlänge des Scanners. In vielen Fällen reicht es aus, den Fahrbereich des AGV mit zwei Scannern abzusichern. Bedingt durch die Fahrtrichtung wird jedoch immer nur ein Scanner von der lokalen Sicherheitssteuerung ausgewertet. Dazu können unterschiedliche technische Lösungen zum Einsatz kommen.
Eine komfortable Möglichkeit besteht darin, die sicherheitsrelevanten Informationen über ein standardisiertes Safety-Protokoll – zum Beispiel Profisafe – auszutauschen. Je nach der zur Verfügung stehenden Datenbreite lassen sich die einzelnen Feldsätze des Scanners so feingranular sowie geschwindigkeitsabhängig ansteuern. Alternativ können die sicherheitsrelevanten Signale über lokale I/O-Module zwischen der Sicherheitssteuerung und dem Scanner kommuniziert werden. In diesem Fall erfolgt die Erfassung der Geschwindigkeitssignale über Encoder, deren Weiterverarbeitung im konfigurierbaren Sicherheitssystem PSRmodular von Phoenix Contact stattfindet. Mit speziellen AGV-Funktionsbausteinen gibt es die Möglichkeit, eine Differenzgeschwindigkeit aus zwei Encoder-Signalen zu ermitteln, die sich beispielsweise bei einer Kurvenfahrt ergibt. Auf diese Weise lassen sich unter Beachtung der baulichen Gegebenheiten – etwa bei beengten Fahrtrassen – die optimalen Bewegungsprofile konfigurieren.
Safety Bridge Technology für den Einsatz in Dark Warehouses
AGV werden oftmals im Verbund in Dark Warehouses genutzt. Hierbei handelt es sich um nahezu vollständig automatisierte Lager- und Logistikzentren, die praktisch ohne Bedienpersonal auskommen. Sofern die AGVs keine lokalen Personenerkennungsmaßnahmen aufweisen, sind Schutzumhausungen vorzusehen, wobei der Zugangsbereich durch beweglich trennende Schutzeinrichtungen mit Verriegelungen abgesichert wird. Darüber hinaus wirken sich globale Not-Halt-Signale von den Bedienstellen auf jedes einzelne Flurförderzeug aus.
Für die sicherheitsgerichtete Kommunikation in diesem Umfeld eignet sich insbesondere die Safety Bridge Technology (SBT) von Phoenix Contact. Ein lauffähiges SBT-System setzt sich aus sicheren Ein- und Ausgangsmodulen sowie den sogenannten Logikmodulen (LPSDO) zusammen. Das Logikmodul fungiert als zentraler Bestandteil der Safety-Bridge-Installation. Es generiert und kontrolliert das sicherheitsgerichtete SBT-Übertragungsprotokoll und bearbeitet die logischen Verknüpfungen der parametrierten Sicherheitslogik. Die sicheren Signale, die mit den Safety-Bridge-I/O-Modulen aufgenommen und ausgegeben werden, lassen sich über fast alle Automatisierungsnetzwerke sowie sämtliche gängigen Steuerungstypen weiterleiten. Die Kommunikation zwischen den Logikmodulen oder zu den Ein- und Ausgangsmodulen kann dabei ebenfalls über den Funkstandard WLAN erfolgen.
Für die Dark-Warehouse-Applikationen wird die AGV-Flotte in verschiedene Gruppen unterteilt. Die SBT-Logikmodule (SBT#1-4) überwachen jeweils eine Gruppe von maximal 15 Flurförderzeugen. Übergeordnet steuert ein SBT-Logikmodul (SBT #0) den sicherheitsgerichteten Datenaustausch zwischen den Gruppen. Auf der Gegenseite empfängt jedes AGV die übergeordneten Not-Halt-Signale zur Weiterleitung an die lokale Sicherheitssteuerung PSRmodular des AGVs.
Funkbasierte Übertragung zur Reduzierung der Inbetriebnahmezeit
Phoenix Contact bietet zur Elektrifizierung und Automatisierung von AGV ein innovatives, aufeinander abgestimmtes Produkt- und Lösungsportfolio. Zu diesem Zweck wird ein AGV unter den Aspekten Control, Communication, Safety, Navigation, Electrification und Energy betrachtet. Auf Basis des offenen und flexiblen Ecosystems PLCnext Technology lassen sich diese Facetten zu einem System kombinieren, welches Vorteile im Engineering sowie der Inbetriebnahme und dem Betrieb der Flurförderzeuge zur Verfügung stellt. Als Beispiel sei der Aspekt der Communication genannt. Das Funkmodul FL WLAN 1100 mit IP54-Eigenschaften ist einfach auf dem AGV montierbar und umfasst eine REST-Schnittstelle. Über dieses Interface kann die PLCnext-Steuerung die WLAN-Parameter während der Inbetriebnahme des AGVs auf das Funkmodul schreiben, was den Zeitaufwand deutlich reduziert. Als weiteres Communication-Gerät ermöglicht der neue NearFi-Koppler auf der Grundlage einer 100-MBit-Ethernet-Übertragung in Full Duplex eine störungsfreie AGV-Maschinenkopplung im 60-GHz-Frequenzband.
![]()
Bild- und Textquelle: Phoenix Contact



